| Abstract |
In shared memory multiprocessor architectures, threads can be used to implement parallelism. Historically, hardware vendors have implemented their own proprietary versions of threads, making portability a concern for software developers. For UNIX systems, a standardized C language threads programming interface has been specified by the IEEE POSIX 1003.1c standard. Implementations that adhere to this standard are referred to as POSIX threads, or Pthreads.
在共享内存多处理器体系结构中,线程可以用来实现并行性。从历史上看,硬件供应商已经实现了他们自己的线程专有版本,这使得可移植性成为软件开发人员关注的问题。对于unix系统,ieee posix 1003.1c标准规定了标准的c语言线程编程接口。遵循此标准的实现称为posix线程或pthreads。(fanyi.baidu.com翻译结果)
The tutorial begins with an introduction to concepts, motivations, and design considerations for using Pthreads. Each of the three major classes of routines in the Pthreads API are then covered: Thread Management, Mutex Variables, and Condition Variables. Example codes are used throughout to demonstrate how to use most of the Pthreads routines needed by a new Pthreads programmer. The tutorial concludes with a discussion of LLNL specifics and how to mix MPI with pthreads. A lab exercise, with numerous example codes (C Language) is also included.
本教程首先介绍使用pthread的概念、动机和设计注意事项。接下来将介绍pthreads api中的三个主要例程类:线程管理、互斥变量和条件变量。示例代码始终用于演示如何使用新pthreads程序员所需的大多数pthreads例程。本教程最后讨论了llnl的细节以及如何将mpi与pthreads混合。还包括一个带有大量示例代码(C语言)的实验室练习。
Level/Prerequisites: This tutorial is ideal for those who are new to parallel programming with pthreads. A basic understanding of parallel programming in C is required. For those who are unfamiliar with Parallel Programming in general, the material covered in EC3500: Introduction to Parallel Computing would be helpful.
级别/先决条件:本教程非常适合那些刚开始使用pthreads进行并行编程的人。需要对C语言中的并行编程有基本的了解。对于一般不熟悉并行编程的人来说,EC3500:并行计算简介中的内容会很有帮助。
| Pthreads Overview |
What is a Thread?
- Technically, a thread is defined as an independent stream of instructions that can be scheduled to run as such by the operating system. But what does this mean?
从技术上讲,线程被定义为一个独立的指令流,操作系统可以将其调度为这样运行。但这是什么意思?
- To the software developer, the concept of a "procedure" that runs independently from its main program may best describe a thread.
对于软件开发人员来说,独立于主程序运行的“过程”的概念最能描述线程。
- To go one step further, imagine a main program (a.out) that contains a number of procedures. Then imagine all of these procedures being able to be scheduled to run simultaneously and/or independently by the operating system. That would describe a "multi-threaded" program.
为了更进一步,设想一个包含许多过程的主程序(a.out)。然后想象所有这些过程都能够被操作系统同时和/或独立地调度运行。这将描述一个“多线程”程序。
- How is this accomplished?
这是怎么做到的?
- Before understanding a thread, one first needs to understand a UNIX process. A process is created by the operating system, and requires a fair amount of "overhead". Processes contain information about program resources and program execution state, including:
在理解线程之前,首先需要了解unix进程。一个进程是由操作系统创建的,需要相当多的“开销”。进程包含有关程序资源和程序执行状态的信息,包括:
- Process ID, process group ID, user ID, and group ID 进程ID、进程组ID、用户ID和组ID
- Environment 环境
- Working directory. 工作目录
- Program instructions 程序指令
- Registers 寄存器
- Stack 栈 (线程)
- Heap 堆
- File descriptors 文件描述符
- Signal actions 信号作用
- Shared libraries 共享库
- Inter-process communication tools (such as message queues, pipes, semaphores, or shared memory).
- 进程间通信工具(如消息队列、管道、信号量或共享内存)。
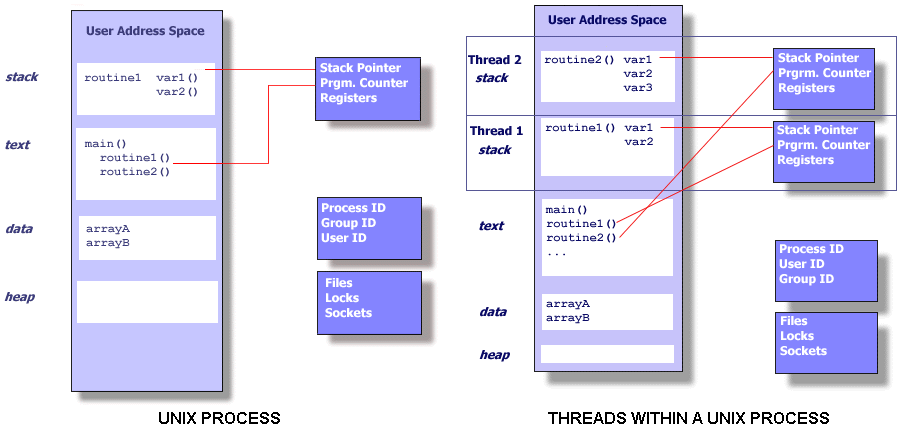
- Threads use and exist within these process resources, yet are able to be scheduled by the operating system and run as independent entities largely because they duplicate only the bare essential resources that enable them to exist as executable code.
线程使用并存在于这些进程资源中,但它们可以由操作系统调度,并且作为独立的实体运行,主要是因为它们只复制允许它们作为可执行代码存在的裸露的基本资源。
- This independent flow of control is accomplished because a thread maintains its own: 这一独立的控制流之所以完成,是因为线程维护自己的:
- Stack pointer 栈指针
- Registers 寄存器
- Scheduling properties (such as policy or priority)计划属性(如策略或优先级)
- Set of pending and blocked signals 待处理和阻塞信号集
- Thread specific data. 线程特定数据
- So, in summary, in the UNIX environment a thread:总之,在unix环境中,一个线程:
- Exists within a process and uses the process resources 存在于进程内并使用进程资源
- Has its own independent flow of control as long as its parent process exists and the OS supports it只要它的父进程存在并且OS支持它,它就有自己独立的控制流。
- Duplicates only the essential resources it needs to be independently schedulable只复制它需要独立可调度的基本资源
- May share the process resources with other threads that act equally independently (and dependently)可以与其他独立(独立)工作的线程共享进程资源。
- Dies if the parent process dies - or something similar如果父进程死亡或类似的事情
- Is "lightweight" because most of the overhead has already been accomplished through the creation of its process.是“轻量级”的,因为大部分开销已经通过创建其进程来完成。
- Because threads within the same process share resources:因为同一进程中的线程共享资源:
- Changes made by one thread to shared system resources (such as closing a file) will be seen by all other threads.一个线程对共享系统资源所做的更改(例如关闭文件)将被所有其他线程看到。
- Two pointers having the same value point to the same data.具有相同值的两个指针指向相同的数据。
- Reading and writing to the same memory locations is possible, and therefore requires explicit synchronization by the programmer. 读取和写入相同的内存位置是可能的,因此需要程序员显式同步。
| Pthreads Overview |
What are Pthreads?
- Historically, hardware vendors have implemented their own proprietary versions of threads. These implementations differed substantially from each other making it difficult for programmers to develop portable threaded applications.历史上,硬件供应商已经实现了他们自己的线程专有版本。这些实现之间有很大的不同,使得程序员很难开发可移植的线程应用程序。
- In order to take full advantage of the capabilities provided by threads, a standardized programming interface was required.为了充分利用线程提供的功能,需要一个标准化的编程接口。
- For UNIX systems, this interface has been specified by the IEEE POSIX 1003.1c standard (1995).对于unix系统,此接口已由ieee posix 1003.1c标准(1995)指定。
- Implementations adhering to this standard are referred to as POSIX threads, or Pthreads.遵循此标准的实现称为posix线程或pthreads。
- Most hardware vendors now offer Pthreads in addition to their proprietary API's.大多数硬件供应商现在除了他们专有的api之外还提供pthread。
- The POSIX standard has continued to evolve and undergo revisions, including the Pthreads specification.POSIX标准一直在不断发展和修订,包括pthreads规范。
- Some useful links:
- standards.ieee.org/findstds/standard/1003.1-2008.html
- www.opengroup.org/austin/papers/posix_faq.html
- www.unix.org/version3/ieee_std.html
- Pthreads are defined as a set of C language programming types and procedure calls, implemented with a pthread.h header/include file and a thread library - though this library may be part of another library, such as libc, in some implementations. pthreads被定义为一组c语言编程类型和过程调用,用pthread.h头/包含文件和线程库实现——尽管在某些实现中,这个库可能是另一个库(如libc)的一部分。
| Pthreads Overview |
Why Pthreads?
 Light Weight: 重量轻:
Light Weight: 重量轻:
- When compared to the cost of creating and managing a process, a thread can be created with much less operating system overhead. Managing threads requires fewer system resources than managing processes.与创建和管理进程的成本相比,创建线程的操作系统开销要少得多。管理线程比管理进程需要更少的系统资源。
- For example, the following table compares timing results for the fork() subroutine and the pthread_create() subroutine. Timings reflect 50,000 process/thread creations, were performed with the time utility, and units are in seconds, no optimization flags.Note: don't expect the sytem and user times to add up to real time, because these are SMP systems with multiple CPUs/cores working on the problem at the same time. At best, these are approximations run on local machines, past and present.例如,下表比较fork()子例程和pthread_create()子例程的计时结果。计时反映50000个进程/线程创建,使用时间实用程序执行,单位为秒,没有优化标志。注意:不要期望系统和用户时间加起来是实时的,因为这些是多个CPU/内核同时处理问题的SMP系统。充其量,这些是在本地机器上运行的近似,过去和现在。
Platform fork() pthread_create() real user sys real user sys Intel 2.6 GHz Xeon E5-2670 (16 cores/node) 8.1 0.1 2.9 0.9 0.2 0.3 Intel 2.8 GHz Xeon 5660 (12 cores/node) 4.4 0.4 4.3 0.7 0.2 0.5 AMD 2.3 GHz Opteron (16 cores/node) 12.5 1.0 12.5 1.2 0.2 1.3 AMD 2.4 GHz Opteron (8 cores/node) 17.6 2.2 15.7 1.4 0.3 1.3 IBM 4.0 GHz POWER6 (8 cpus/node) 9.5 0.6 8.8 1.6 0.1 0.4 IBM 1.9 GHz POWER5 p5-575 (8 cpus/node) 64.2 30.7 27.6 1.7 0.6 1.1 IBM 1.5 GHz POWER4 (8 cpus/node) 104.5 48.6 47.2 2.1 1.0 1.5 INTEL 2.4 GHz Xeon (2 cpus/node) 54.9 1.5 20.8 1.6 0.7 0.9 INTEL 1.4 GHz Itanium2 (4 cpus/node) 54.5 1.1 22.2 2.0 1.2 0.6  fork_vs_thread.txt
fork_vs_thread.txt
Efficient Communications/Data Exchange:高效的通信/数据交换
- The primary motivation for considering the use of Pthreads in a high performance computing environment is to achieve optimum performance. In particular, if an application is using MPI for on-node communications, there is a potential that performance could be improved by using Pthreads instead.考虑在高性能计算环境中使用pthreads的主要动机是获得最佳性能。特别是,如果应用程序使用mpi进行节点上的通信,那么使用pthreads可以提高性能。
- MPI libraries usually implement on-node task communication via shared memory, which involves at least one memory copy operation (process to process).mpi库通常通过共享内存实现节点上的任务通信,其中至少涉及一个内存复制操作(进程到进程)。
- For Pthreads there is no intermediate memory copy required because threads share the same address space within a single process. There is no data transfer, per se. It can be as efficient as simply passing a pointer.对于pthreads,不需要中间内存拷贝,因为线程在单个进程中共享相同的地址空间。本质上没有数据传输。它可以像简单地传递指针一样高效。
- In the worst case scenario, Pthread communications become more of a cache-to-CPU or memory-to-CPU bandwidth issue. These speeds are much higher than MPI shared memory communications.在最坏的情况下,pthread通信变得更像是一个缓存到cpu或内存到cpu的带宽问题。这些速度远高于mpi共享内存通信。
- For example: some local comparisons, past and present, are shown below:例如:一些过去和现在的本地比较如下所示
Platform MPI Shared Memory Bandwidth
(GB/sec)Pthreads Worst Case
Memory-to-CPU Bandwidth
(GB/sec)Intel 2.6 GHz Xeon E5-2670 4.5 51.2 Intel 2.8 GHz Xeon 5660 5.6 32 AMD 2.3 GHz Opteron 1.8 5.3 AMD 2.4 GHz Opteron 1.2 5.3 IBM 1.9 GHz POWER5 p5-575 4.1 16 IBM 1.5 GHz POWER4 2.1 4 Intel 2.4 GHz Xeon 0.3 4.3 Intel 1.4 GHz Itanium 2 1.8 6.4
Other Common Reasons:
- Threaded applications offer potential performance gains and practical advantages over non-threaded applications in several other ways:与非线程应用程序相比,线程应用程序在以下几个方面提供了潜在的性能增益和实际优势:
- Overlapping CPU work with I/O: For example, a program may have sections where it is performing a long I/O operation. While one thread is waiting for an I/O system call to complete, CPU intensive work can be performed by other threads.重叠的CPU与I/O工作:例如,程序可能有执行长I/O操作的部分。当一个线程等待I/O系统调用完成时,CPU密集型工作可以由其他线程执行。
- Priority/real-time scheduling: tasks which are more important can be scheduled to supersede or interrupt lower priority tasks.优先级/实时调度:更重要的任务可以被调度以取代或中断较低优先级的任务。
- Asynchronous event handling: tasks which service events of indeterminate frequency and duration can be interleaved. For example, a web server can both transfer data from previous requests and manage the arrival of new requests.异步事件处理:服务频率和持续时间不确定的事件的任务。例如,web服务器既可以传输以前请求的数据,也可以管理新请求的到达。
- A perfect example is the typical web browser, where many interleaved tasks can be happening at the same time, and where tasks can vary in priority.一个完美的例子是典型的web浏览器,其中许多交错的任务可以同时发生,并且任务的优先级可以不同。
- Another good example is a modern operating system, which makes extensive use of threads. A screenshot of the MS Windows OS and applications using threads is shown below.另一个很好的例子是现代操作系统,它广泛使用线程。使用线程的MS Windows操作系统和应用程序的屏幕截图如下所示。

Click for larger image
| Pthreads Overview |
Designing Threaded Programs
Parallel Programming:并行编程:
- On modern, multi-core machines, pthreads are ideally suited for parallel programming, and whatever applies to parallel programming in general, applies to parallel pthreads programs.在现代的多核机器上,pthreads非常适合并行编程,无论什么样的应用于并行编程,一般都适用于并行pthreads程序。
- There are many considerations for designing parallel programs, such as:设计并行程序需要考虑很多因素,例如:
- What type of parallel programming model to use?使用哪种类型的并行编程模型?
- Problem partitioning问题分区
- Load balancing负载均衡
- Communications通信
- Data dependencies资料相依
- Synchronization and race conditions同步和竞争条件
- Memory issues内存问题
- I/O issues I/O问题
- Program complexity程序复杂性
- Programmer effort/costs/time 程序员工作/成本/时间
- ...
- Covering these topics is beyond the scope of this tutorial, however interested readers can obtain a quick overview in the Introduction to Parallel Computing tutorial.涵盖这些主题超出了本教程的范围,但是感兴趣的读者可以在并行计算入门教程中获得一个快速的概述。
- In general though, in order for a program to take advantage of Pthreads, it must be able to be organized into discrete, independent tasks which can execute concurrently. For example, if routine1 and routine2 can be interchanged, interleaved and/or overlapped in real time, they are candidates for threading.但是,一般来说,为了让程序利用pthreads,它必须能够被组织成可以并发执行的离散的、独立的任务。例如,如果routine1和routine2可以实时交换、交织和/或重叠,则它们是线程的候选对象。

- Programs having the following characteristics may be well suited for pthreads:具有以下特性的程序可能非常适合pthread:
- Work that can be executed, or data that can be operated on, by multiple tasks simultaneously:可由多个任务同时执行的工作或可操作的数据:
- Block for potentially long I/O waits阻止潜在的长I/O等待
- Use many CPU cycles in some places but not others在某些地方使用许多CPU周期,但在其他地方不使用
- Must respond to asynchronous events必须响应异步事件
- Some work is more important than other work (priority interrupts)有些工作比其他工作更重要(优先级中断)
- Several common models for threaded programs exist:有几种常见的线程程序模型存在:
- Manager/worker: a single thread, the manager assigns work to other threads, the workers. Typically, the manager handles all input and parcels out work to the other tasks. At least two forms of the manager/worker model are common: static worker pool and dynamic worker pool.管理器/工作线程:一个线程,管理器将工作分配给其他线程,即工作线程。通常,管理器处理所有输入,并将工作分配给其他任务。管理器/工作器模型至少有两种常见形式:静态工作器池和动态工作器池。
- Pipeline: a task is broken into a series of suboperations, each of which is handled in series, but concurrently, by a different thread. An automobile assembly line best describes this model.管道:一个任务被分解成一系列子操作,每个子操作由一个不同的线程按顺序(但同时)处理。汽车装配线最能描述这种模式。
- Peer: similar to the manager/worker model, but after the main thread creates other threads, it participates in the work.peer:类似于manager/worker模型,但是在主线程创建其他线程之后,它参与工作。
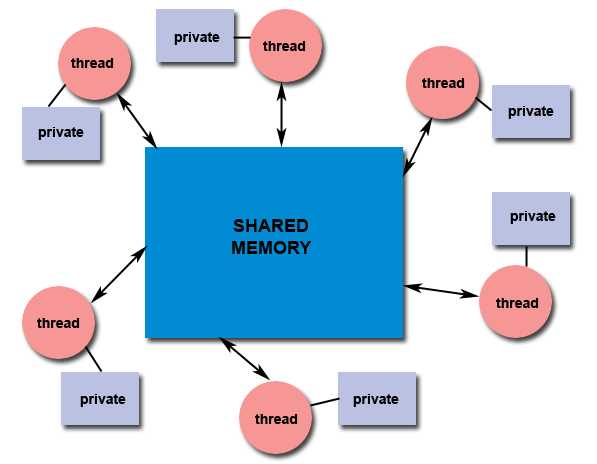
Shared Memory Model: 共享内存模型:
- All threads have access to the same global, shared memory所有线程都可以访问相同的全局共享内存
- Threads also have their own private data线程也有自己的私有数据
- Programmers are responsible for synchronizing access (protecting) globally shared data.程序员负责同步访问(保护)全局共享数据。
Thread-safeness: 线程安全性
- Thread-safeness: in a nutshell, refers an application's ability to execute multiple threads simultaneously without "clobbering" shared data or creating "race" conditions.线程安全性:简而言之,是指应用程序能够同时执行多个线程,而不会“破坏”共享数据或创建“竞争”条件。
- For example, suppose that your application creates several threads, each of which makes a call to the same library routine:例如,假设应用程序创建了几个线程,每个线程都调用同一个库例程:
- This library routine accesses/modifies a global structure or location in memory.此库例程访问/修改内存中的全局结构或位置。
- As each thread calls this routine it is possible that they may try to modify this global structure/memory location at the same time.当每个线程调用此例程时,它们可能会尝试同时修改此全局结构/内存位置。
- If the routine does not employ some sort of synchronization constructs to prevent data corruption, then it is not thread-safe.如果例程没有使用某种同步结构来防止数据损坏,则它不是线程安全的。

- The implication to users of external library routines is that if you aren't 100% certain the routine is thread-safe, then you take your chances with problems that could arise.对于外部库例程的用户来说,这意味着如果您不能百分之百地确定该例程是线程安全的,那么您可以冒险处理可能出现的问题。
- Recommendation: Be careful if your application uses libraries or other objects that don't explicitly guarantee thread-safeness. When in doubt, assume that they are not thread-safe until proven otherwise. This can be done by "serializing" the calls to the uncertain routine, etc.建议:如果应用程序使用的库或其他对象不能明确保证线程的安全性,请小心。当有疑问时,假设它们不是线程安全的,除非另有证明。这可以通过“序列化”对不确定例程的调用等来实现。
Thread Limits: 线程限制
- Although the Pthreads API is an ANSI/IEEE standard, implementations can, and usually do, vary in ways not specified by the standard.尽管pthreads api是一个ansi/ieee标准,但是实现可以而且通常会以标准未指定的方式变化。
- Because of this, a program that runs fine on one platform, may fail or produce wrong results on another platform.因此,在一个平台上运行良好的程序可能会在另一个平台上失败或产生错误的结果。
- For example, the maximum number of threads permitted, and the default thread stack size are two important limits to consider when designing your program.例如,允许的最大线程数和默认线程堆栈大小是设计程序时要考虑的两个重要限制。
- Several thread limits are discussed in more detail later in this tutorial.本教程后面将更详细地讨论几个线程限制。
| The Pthreads API |
- The original Pthreads API was defined in the ANSI/IEEE POSIX 1003.1 - 1995 standard. The POSIX standard has continued to evolve and undergo revisions, including the Pthreads specification.最初的pthreads api是在ansi/ieee posix 1003.1-1995标准中定义的。POSIX标准一直在不断发展和修订,包括pthreads规范。
- Copies of the standard can be purchased from IEEE or downloaded for free from other sites online.该标准的副本可以从ieee购买,也可以从其他在线站点免费下载。
- The subroutines which comprise the Pthreads API can be informally grouped into four major groups:组成pthreads api的子例程可以非正式地分为四大类:
- Thread management: Routines that work directly on threads - creating, detaching, joining, etc. They also include functions to set/query thread attributes (joinable, scheduling etc.)线程管理:直接在线程上工作的例程-创建、分离、连接等。它们还包括设置/查询线程属性(可连接、调度等)的函数。
- Mutexes: Routines that deal with synchronization, called a "mutex", which is an abbreviation for "mutual exclusion". Mutex functions provide for creating, destroying, locking and unlocking mutexes. These are supplemented by mutex attribute functions that set or modify attributes associated with mutexes.互斥体:处理同步的例程,称为互斥体,是互斥体的缩写。互斥函数提供创建、销毁、锁定和解除互斥的功能。此外,互斥属性函数还可以设置或修改与互斥关联的属性。
- Condition variables: Routines that address communications between threads that share a mutex. Based upon programmer specified conditions. This group includes functions to create, destroy, wait and signal based upon specified variable values. Functions to set/query condition variable attributes are also included.条件变量:处理共享互斥锁的线程之间通信的例程。基于程序员指定的条件。该组包括基于指定变量值创建、销毁、等待和发送信号的函数。还包括设置/查询条件变量属性的函数。
- Synchronization: Routines that manage read/write locks and barriers.同步:管理读/写锁和屏障的例程。
- Naming conventions: All identifiers in the threads library begin with pthread_. Some examples are shown below.命名约定:线程库中的所有标识符都以pthread开头。下面是一些例子。
Routine Prefix Functional Group pthread_ Threads themselves and miscellaneous subroutines pthread_attr_ Thread attributes objects pthread_mutex_ Mutexes pthread_mutexattr_ Mutex attributes objects. pthread_cond_ Condition variables pthread_condattr_ Condition attributes objects pthread_key_ Thread-specific data keys pthread_rwlock_ Read/write locks pthread_barrier_ Synchronization barriers - The concept of opaque objects pervades the design of the API. The basic calls work to create or modify opaque objects - the opaque objects can be modified by calls to attribute functions, which deal with opaque attributes.不透明对象的概念渗透在api的设计中。基本调用用于创建或修改不透明对象-可以通过调用处理不透明属性的属性函数来修改不透明对象。
- The Pthreads API contains around 100 subroutines. This tutorial will focus on a subset of these - specifically, those which are most likely to be immediately useful to the beginning Pthreads programmer.pthreads api包含大约100个子例程。本教程将重点介绍其中的一个子集—特别是那些对刚开始的pthreads程序员最有可能立即有用的子集。
- For portability, the pthread.h header file should be included in each source file using the Pthreads library.为了便于移植,pthread.h头文件应该包含在每个使用pthreads库的源文件中。
- The current POSIX standard is defined only for the C language. Fortran programmers can use wrappers around C function calls. Some Fortran compilers may provide a Fortran pthreads API.当前的posix标准仅为c语言定义。Fortran程序员可以在C函数调用周围使用包装器。一些Fortran编译器可能提供Fortran pthreads API。
- A number of excellent books about Pthreads are available. Several of these are listed in the References section of this tutorial.有很多关于pthreads的优秀书籍。其中一些在本教程的“参考”部分中列出。
| Compiling Threaded Programs 编译线程程序 |
- Several examples of compile commands used for pthreads codes are listed in the table below.下表列出了几个用于pthreads代码的编译命令示例。
Compiler / Platform Compiler Command Description INTEL
Linuxicc -pthread C icpc -pthread C++ PGI
Linuxpgcc -lpthread C pgCC -lpthread C++ GNU
Linux, Blue Genegcc -pthread GNU C g++ -pthread GNU C++ IBM
Blue Genebgxlc_r / bgcc_r C (ANSI / non-ANSI) bgxlC_r, bgxlc++_r C++
| Thread Management |
Creating and Terminating Threads
Routines:
| pthread_create (thread,attr,start_routine,arg) pthread_exit (status) pthread_cancel (thread)pthread_attr_init (attr) pthread_attr_destroy (attr) |
Creating Threads:
- Initially, your main() program comprises a single, default thread. All other threads must be explicitly created by the programmer.最初,main()程序由一个默认线程组成。所有其他线程必须由程序员显式创建。
- pthread_create creates a new thread and makes it executable. This routine can be called any number of times from anywhere within your code.pthread_create创建一个新线程并使其可执行。这个例程可以从代码中的任何地方调用任意次数。
- pthread_create arguments:
- thread: An opaque, unique identifier for the new thread returned by the subroutine.子例程返回的新线程的不透明唯一标识符。
- attr: An opaque attribute object that may be used to set thread attributes. You can specify a thread attributes object, or NULL for the default values.可用于设置线程属性的不透明属性对象。您可以指定线程属性对象,或者为默认值指定空值。
- start_routine: the C routine that the thread will execute once it is created.线程创建后将执行的C例程。
- arg: A single argument that may be passed to start_routine. It must be passed by reference as a pointer cast of type void. NULL may be used if no argument is to be passed.可以传递给启动例程的单个参数。它必须作为void类型的指针转换通过引用传递。如果不传递参数,则可以使用null。
- The maximum number of threads that may be created by a process is implementation dependent. Programs that attempt to exceed the limit can fail or produce wrong results.
- Querying and setting your implementation's thread limit - Linux example shown. Demonstrates querying the default (soft) limits and then setting the maximum number of processes (including threads) to the hard limit. Then verifying that the limit has been overridden.
bash / ksh / sh tcsh / csh $ ulimit -a core file size (blocks, -c) 16 data seg size (kbytes, -d) unlimited scheduling priority (-e) 0 file size (blocks, -f) unlimited pending signals (-i) 255956 max locked memory (kbytes, -l) 64 max memory size (kbytes, -m) unlimited open files (-n) 1024 pipe size (512 bytes, -p) 8 POSIX message queues (bytes, -q) 819200 real-time priority (-r) 0 stack size (kbytes, -s) unlimited cpu time (seconds, -t) unlimited max user processes (-u) 1024 virtual memory (kbytes, -v) unlimited file locks (-x) unlimited $ ulimit -Hu 7168 $ ulimit -u 7168 $ ulimit -a core file size (blocks, -c) 16 data seg size (kbytes, -d) unlimited scheduling priority (-e) 0 file size (blocks, -f) unlimited pending signals (-i) 255956 max locked memory (kbytes, -l) 64 max memory size (kbytes, -m) unlimited open files (-n) 1024 pipe size (512 bytes, -p) 8 POSIX message queues (bytes, -q) 819200 real-time priority (-r) 0 stack size (kbytes, -s) unlimited cpu time (seconds, -t) unlimited max user processes (-u) 7168 virtual memory (kbytes, -v) unlimited file locks (-x) unlimited
% limit cputime unlimited filesize unlimited datasize unlimited stacksize unlimited coredumpsize 16 kbytes memoryuse unlimited vmemoryuse unlimited descriptors 1024 memorylocked 64 kbytes maxproc 1024 % limit maxproc unlimited % limit cputime unlimited filesize unlimited datasize unlimited stacksize unlimited coredumpsize 16 kbytes memoryuse unlimited vmemoryuse unlimited descriptors 1024 memorylocked 64 kbytes maxproc 7168
- Once created, threads are peers, and may create other threads. There is no implied hierarchy or dependency between threads.

Thread Attributes:
- By default, a thread is created with certain attributes. Some of these attributes can be changed by the programmer via the thread attribute object.
- pthread_attr_init and pthread_attr_destroy are used to initialize/destroy the thread attribute object.
- Other routines are then used to query/set specific attributes in the thread attribute object. Attributes include:
- Detached or joinable state
- Scheduling inheritance
- Scheduling policy
- Scheduling parameters
- Scheduling contention scope
- Stack size
- Stack address
- Stack guard (overflow) size
- Some of these attributes will be discussed later.
Thread Binding and Scheduling:
| Question: After a thread has been created, how do you know a)when it will be scheduled to run by the operating system, and b)which processor/core it will run on? |
- The Pthreads API provides several routines that may be used to specify how threads are scheduled for execution. For example, threads can be scheduled to run FIFO (first-in first-out), RR (round-robin) or OTHER (operating system determines). It also provides the ability to set a thread's scheduling priority value.
- These topics are not covered here, however a good overview of "how things work" under Linux can be found in the sched_setscheduler man page.
- The Pthreads API does not provide routines for binding threads to specific cpus/cores. However, local implementations may include this functionality - such as providing the non-standard pthread_setaffinity_np routine. Note that "_np" in the name stands for "non-portable".
- Also, the local operating system may provide a way to do this. For example, Linux provides the sched_setaffinity routine.
Terminating Threads & pthread_exit():
- There are several ways in which a thread may be terminated:
- The thread returns normally from its starting routine. Its work is done.
- The thread makes a call to the pthread_exit subroutine - whether its work is done or not.
- The thread is canceled by another thread via the pthread_cancel routine.
- The entire process is terminated due to making a call to either the exec() or exit()
- If main() finishes first, without calling pthread_exit explicitly itself
- The pthread_exit() routine allows the programmer to specify an optional termination status parameter. This optional parameter is typically returned to threads "joining" the terminated thread (covered later).
- In subroutines that execute to completion normally, you can often dispense with calling pthread_exit() - unless, of course, you want to pass the optional status code back.
- Cleanup: the pthread_exit() routine does not close files; any files opened inside the thread will remain open after the thread is terminated.
- Discussion on calling pthread_exit() from main():
- There is a definite problem if main() finishes before the threads it spawned if you don't call pthread_exit() explicitly. All of the threads it created will terminate because main() is done and no longer exists to support the threads.
- By having main() explicitly call pthread_exit() as the last thing it does, main() will block and be kept alive to support the threads it created until they are done.
Example: Pthread Creation and Termination
- This simple example code creates 5 threads with the pthread_create() routine. Each thread prints a "Hello World!" message, and then terminates with a call to pthread_exit().

Pthread Creation and Termination Example1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29#include <pthread.h> #include <stdio.h> #define NUM_THREADS 5 void *PrintHello(void *threadid) { long tid; tid = (long)threadid; printf("Hello World! It's me, thread #%ld!\n", tid); pthread_exit(NULL); } int main (int argc, char *argv[]) { pthread_t threads[NUM_THREADS]; int rc; long t; for(t=0; t<NUM_THREADS; t++){ printf("In main: creating thread %ld\n", t); rc = pthread_create(&threads[t], NULL, PrintHello, (void *)t); if (rc){ printf("ERROR; return code from pthread_create() is %d\n", rc); exit(-1); } } /* Last thing that main() should do */ pthread_exit(NULL); }

| Thread Management |
Passing Arguments to Threads
- The pthread_create() routine permits the programmer to pass one argument to the thread start routine. For cases where multiple arguments must be passed, this limitation is easily overcome by creating a structure which contains all of the arguments, and then passing a pointer to that structure in the pthread_create() routine.
- All arguments must be passed by reference and cast to (void *).
| Question: How can you safely pass data to newly created threads, given their non-deterministic start-up and scheduling? |
long taskids[NUM_THREADS];
for(t=0; t<NUM_THREADS; t++)
{
taskids[t] = t;
printf("Creating thread %ld\n", t);
rc = pthread_create(&threads[t], NULL, PrintHello, (void *) taskids[t]);
...
}
|
struct thread_data{
int thread_id;
int sum;
char *message;
};
struct thread_data thread_data_array[NUM_THREADS];
void *PrintHello(void *threadarg)
{
struct thread_data *my_data;
...
my_data = (struct thread_data *) threadarg;
taskid = my_data->thread_id;
sum = my_data->sum;
hello_msg = my_data->message;
...
}
int main (int argc, char *argv[])
{
...
thread_data_array[t].thread_id = t;
thread_data_array[t].sum = sum;
thread_data_array[t].message = messages[t];
rc = pthread_create(&threads[t], NULL, PrintHello,
(void *) &thread_data_array[t]);
...
}
|
address
t
int rc;
long t;
for(t=0; t<NUM_THREADS; t++)
{
printf("Creating thread %ld\n", t);
rc = pthread_create(&threads[t], NULL, PrintHello, (void *) &t);
...
}
|
| Thread Management |
Joining and Detaching Threads
Routines:
| pthread_join (threadid,status) pthread_detach (threadid) pthread_attr_setdetachstate (attr,detachstate) pthread_attr_getdetachstate (attr,detachstate) |
Joining:
- "Joining" is one way to accomplish synchronization between threads. For example:

- The pthread_join() subroutine blocks the calling thread until the specified threadid thread terminates.
- The programmer is able to obtain the target thread's termination return status if it was specified in the target thread's call to pthread_exit().
- A joining thread can match one pthread_join() call. It is a logical error to attempt multiple joins on the same thread.
- Two other synchronization methods, mutexes and condition variables, will be discussed later.
Joinable or Not?
- When a thread is created, one of its attributes defines whether it is joinable or detached. Only threads that are created as joinable can be joined. If a thread is created as detached, it can never be joined.
- The final draft of the POSIX standard specifies that threads should be created as joinable.
- To explicitly create a thread as joinable or detached, the attr argument in the pthread_create() routine is used. The typical 4 step process is:
- Declare a pthread attribute variable of the pthread_attr_t data type
- Initialize the attribute variable with pthread_attr_init()
- Set the attribute detached status with pthread_attr_setdetachstate()
- When done, free library resources used by the attribute with pthread_attr_destroy()
Detaching:
- The pthread_detach() routine can be used to explicitly detach a thread even though it was created as joinable.
- There is no converse routine.
Recommendations:
- If a thread requires joining, consider explicitly creating it as joinable. This provides portability as not all implementations may create threads as joinable by default.
- If you know in advance that a thread will never need to join with another thread, consider creating it in a detached state. Some system resources may be able to be freed.
Example: Pthread Joining
- This example demonstrates how to "wait" for thread completions by using the Pthread join routine.
- Since some implementations of Pthreads may not create threads in a joinable state, the threads in this example are explicitly created in a joinable state so that they can be joined later.
Pthread Joining Example1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57#include <pthread.h> #include <stdio.h> #include <stdlib.h> #include <math.h> #define NUM_THREADS 4 void *BusyWork(void *t) { int i; long tid; double result=0.0; tid = (long)t; printf("Thread %ld starting...\n",tid); for (i=0; i<1000000; i++) { result = result + sin(i) * tan(i); } printf("Thread %ld done. Result = %e\n",tid, result); pthread_exit((void*) t); } int main (int argc, char *argv[]) { pthread_t thread[NUM_THREADS]; pthread_attr_t attr; int rc; long t; void *status; /* Initialize and set thread detached attribute */ pthread_attr_init(&attr); pthread_attr_setdetachstate(&attr, PTHREAD_CREATE_JOINABLE); for(t=0; t<NUM_THREADS; t++) { printf("Main: creating thread %ld\n", t); rc = pthread_create(&thread[t], &attr, BusyWork, (void *)t); if (rc) { printf("ERROR; return code from pthread_create() is %d\n", rc); exit(-1); } } /* Free attribute and wait for the other threads */ pthread_attr_destroy(&attr); for(t=0; t<NUM_THREADS; t++) { rc = pthread_join(thread[t], &status); if (rc) { printf("ERROR; return code from pthread_join() is %d\n", rc); exit(-1); } printf("Main: completed join with thread %ld having a status of %ld\n",t,(long)status); } printf("Main: program completed. Exiting.\n"); pthread_exit(NULL); }
| Thread Management |
Stack Management
Routines:
| pthread_attr_getstacksize (attr, stacksize) pthread_attr_setstacksize (attr, stacksize) pthread_attr_getstackaddr (attr, stackaddr) pthread_attr_setstackaddr (attr, stackaddr) |
Preventing Stack Problems:
- The POSIX standard does not dictate the size of a thread's stack. This is implementation dependent and varies.
- Exceeding the default stack limit is often very easy to do, with the usual results: program termination and/or corrupted data.
- Safe and portable programs do not depend upon the default stack limit, but instead, explicitly allocate enough stack for each thread by using the pthread_attr_setstacksize routine.
- The pthread_attr_getstackaddr and pthread_attr_setstackaddr routines can be used by applications in an environment where the stack for a thread must be placed in some particular region of memory.
Some Practical Examples at LC:
- Default thread stack size varies greatly. The maximum size that can be obtained also varies greatly, and may depend upon the number of threads per node.
- Both past and present architectures are shown to demonstrate the wide variation in default thread stack size.
Node
Architecture#CPUs Memory (GB) Default Size
(bytes)Intel Xeon E5-2670 16 32 2,097,152 Intel Xeon 5660 12 24 2,097,152 AMD Opteron 8 16 2,097,152 Intel IA64 4 8 33,554,432 Intel IA32 2 4 2,097,152 IBM Power5 8 32 196,608 IBM Power4 8 16 196,608 IBM Power3 16 16 98,304
Example: Stack Management
- This example demonstrates how to query and set a thread's stack size.
Stack Management Example1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48#include <pthread.h> #include <stdio.h> #define NTHREADS 4 #define N 1000 #define MEGEXTRA 1000000 pthread_attr_t attr; void *dowork(void *threadid) { double A[N][N]; int i,j; long tid; size_t mystacksize; tid = (long)threadid; pthread_attr_getstacksize (&attr, &mystacksize); printf("Thread %ld: stack size = %li bytes \n", tid, mystacksize); for (i=0; i<N; i++) for (j=0; j<N; j++) A[i][j] = ((i*j)/3.452) + (N-i); pthread_exit(NULL); } int main(int argc, char *argv[]) { pthread_t threads[NTHREADS]; size_t stacksize; int rc; long t; pthread_attr_init(&attr); pthread_attr_getstacksize (&attr, &stacksize); printf("Default stack size = %li\n", stacksize); stacksize = sizeof(double)*N*N+MEGEXTRA; printf("Amount of stack needed per thread = %li\n",stacksize); pthread_attr_setstacksize (&attr, stacksize); printf("Creating threads with stack size = %li bytes\n",stacksize); for(t=0; t<NTHREADS; t++){ rc = pthread_create(&threads[t], &attr, dowork, (void *)t); if (rc){ printf("ERROR; return code from pthread_create() is %d\n", rc); exit(-1); } } printf("Created %ld threads.\n", t); pthread_exit(NULL); }
| Thread Management |
Miscellaneous Routines
| pthread_self () pthread_equal (thread1,thread2) |
- pthread_self returns the unique, system assigned thread ID of the calling thread.
- pthread_equal compares two thread IDs. If the two IDs are different 0 is returned, otherwise a non-zero value is returned.
- Note that for both of these routines, the thread identifier objects are opaque and can not be easily inspected. Because thread IDs are opaque objects, the C language equivalence operator == should not be used to compare two thread IDs against each other, or to compare a single thread ID against another value.
pthread_once (once_control, init_routine) - pthread_once executes the init_routine exactly once in a process. The first call to this routine by any thread in the process executes the given init_routine, without parameters. Any subsequent call will have no effect.
- The init_routine routine is typically an initialization routine.
- The once_control parameter is a synchronization control structure that requires initialization prior to calling pthread_once. For example:pthread_once_t once_control = PTHREAD_ONCE_INIT;
| Pthread Exercise 1 |
Getting Started and Thread Management Routines
Overview:
|
 GO TO THE EXERCISE HERE
GO TO THE EXERCISE HERE
| Mutex Variables |
Overview
- Mutex is an abbreviation for "mutual exclusion". Mutex variables are one of the primary means of implementing thread synchronization and for protecting shared data when multiple writes occur.
- A mutex variable acts like a "lock" protecting access to a shared data resource. The basic concept of a mutex as used in Pthreads is that only one thread can lock (or own) a mutex variable at any given time. Thus, even if several threads try to lock a mutex only one thread will be successful. No other thread can own that mutex until the owning thread unlocks that mutex. Threads must "take turns" accessing protected data.
- Mutexes can be used to prevent "race" conditions. An example of a race condition involving a bank transaction is shown below:
Thread 1 Thread 2 Balance Read balance: $1000 $1000 Read balance: $1000 $1000 Deposit $200 $1000 Deposit $200 $1000 Update balance $1000+$200 $1200 Update balance $1000+$200 $1200 - In the above example, a mutex should be used to lock the "Balance" while a thread is using this shared data resource.
- Very often the action performed by a thread owning a mutex is the updating of global variables. This is a safe way to ensure that when several threads update the same variable, the final value is the same as what it would be if only one thread performed the update. The variables being updated belong to a "critical section".
- A typical sequence in the use of a mutex is as follows:
- Create and initialize a mutex variable
- Several threads attempt to lock the mutex
- Only one succeeds and that thread owns the mutex
- The owner thread performs some set of actions
- The owner unlocks the mutex
- Another thread acquires the mutex and repeats the process
- Finally the mutex is destroyed
- When several threads compete for a mutex, the losers block at that call - an unblocking call is available with "trylock" instead of the "lock" call.
- When protecting shared data, it is the programmer's responsibility to make sure every thread that needs to use a mutex does so. For example, if 4 threads are updating the same data, but only one uses a mutex, the data can still be corrupted.
| Mutex Variables |
Creating and Destroying Mutexes
Routines:
| pthread_mutex_init (mutex,attr) pthread_mutex_destroy (mutex) pthread_mutexattr_init (attr) pthread_mutexattr_destroy (attr) |
Usage:
- Mutex variables must be declared with type pthread_mutex_t, and must be initialized before they can be used. There are two ways to initialize a mutex variable:
- Statically, when it is declared. For example:
pthread_mutex_t mymutex = PTHREAD_MUTEX_INITIALIZER; - Dynamically, with the pthread_mutex_init() routine. This method permits setting mutex object attributes, attr.
The mutex is initially unlocked.
- Statically, when it is declared. For example:
- The attr object is used to establish properties for the mutex object, and must be of type pthread_mutexattr_t if used (may be specified as NULL to accept defaults). The Pthreads standard defines three optional mutex attributes:
- Protocol: Specifies the protocol used to prevent priority inversions for a mutex.
- Prioceiling: Specifies the priority ceiling of a mutex.
- Process-shared: Specifies the process sharing of a mutex.
Note that not all implementations may provide the three optional mutex attributes.
- The pthread_mutexattr_init() and pthread_mutexattr_destroy() routines are used to create and destroy mutex attribute objects respectively.
- pthread_mutex_destroy() should be used to free a mutex object which is no longer needed.
| Mutex Variables |
Locking and Unlocking Mutexes
Routines:
| pthread_mutex_lock (mutex) pthread_mutex_trylock (mutex) pthread_mutex_unlock (mutex) |
Usage:
- The pthread_mutex_lock() routine is used by a thread to acquire a lock on the specified mutex variable. If the mutex is already locked by another thread, this call will block the calling thread until the mutex is unlocked.
- pthread_mutex_trylock() will attempt to lock a mutex. However, if the mutex is already locked, the routine will return immediately with a "busy" error code. This routine may be useful in preventing deadlock conditions, as in a priority-inversion situation.
- pthread_mutex_unlock() will unlock a mutex if called by the owning thread. Calling this routine is required after a thread has completed its use of protected data if other threads are to acquire the mutex for their work with the protected data. An error will be returned if:
- If the mutex was already unlocked
- If the mutex is owned by another thread
- There is nothing "magical" about mutexes...in fact they are akin to a "gentlemen's agreement" between participating threads. It is up to the code writer to insure that the necessary threads all make the the mutex lock and unlock calls correctly. The following scenario demonstrates a logical error:
Thread 1 Thread 2 Thread 3 Lock Lock A = 2 A = A+1 A = A*B Unlock Unlock
| Question: When more than one thread is waiting for a locked mutex, which thread will be granted the lock first after it is released? |
Example: Using Mutexes
- This example program illustrates the use of mutex variables in a threads program that performs a dot product.
- The main data is made available to all threads through a globally accessible structure.
- Each thread works on a different part of the data.
- The main thread waits for all the threads to complete their computations, and then it prints the resulting sum.
Using Mutexes Example1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138#include <pthread.h> #include <stdio.h> #include <stdlib.h> /* The following structure contains the necessary information to allow the function "dotprod" to access its input data and place its output into the structure. */ typedef struct { double *a; double *b; double sum; int veclen; } DOTDATA; /* Define globally accessible variables and a mutex */ #define NUMTHRDS 4 #define VECLEN 100 DOTDATA dotstr; pthread_t callThd[NUMTHRDS]; pthread_mutex_t mutexsum; /* The function dotprod is activated when the thread is created. All input to this routine is obtained from a structure of type DOTDATA and all output from this function is written into this structure. The benefit of this approach is apparent for the multi-threaded program: when a thread is created we pass a single argument to the activated function - typically this argument is a thread number. All the other information required by the function is accessed from the globally accessible structure. */ void *dotprod(void *arg) { /* Define and use local variables for convenience */ int i, start, end, len ; long offset; double mysum, *x, *y; offset = (long)arg; len = dotstr.veclen; start = offset*len; end = start + len; x = dotstr.a; y = dotstr.b; /* Perform the dot product and assign result to the appropriate variable in the structure. */ mysum = 0; for (i=start; i<end ; i++) { mysum += (x[i] * y[i]); } /* Lock a mutex prior to updating the value in the shared structure, and unlock it upon updating. */ pthread_mutex_lock (&mutexsum); dotstr.sum += mysum; pthread_mutex_unlock (&mutexsum); pthread_exit((void*) 0); } /* The main program creates threads which do all the work and then print out result upon completion. Before creating the threads, the input data is created. Since all threads update a shared structure, we need a mutex for mutual exclusion. The main thread needs to wait for all threads to complete, it waits for each one of the threads. We specify a thread attribute value that allow the main thread to join with the threads it creates. Note also that we free up handles when they are no longer needed. */ int main (int argc, char *argv[]) { long i; double *a, *b; void *status; pthread_attr_t attr; /* Assign storage and initialize values */ a = (double*) malloc (NUMTHRDS*VECLEN*sizeof(double)); b = (double*) malloc (NUMTHRDS*VECLEN*sizeof(double)); for (i=0; i<VECLEN*NUMTHRDS; i++) { a[i]=1.0; b[i]=a[i]; } dotstr.veclen = VECLEN; dotstr.a = a; dotstr.b = b; dotstr.sum=0; pthread_mutex_init(&mutexsum, NULL); /* Create threads to perform the dotproduct */ pthread_attr_init(&attr); pthread_attr_setdetachstate(&attr, PTHREAD_CREATE_JOINABLE); for(i=0; i<NUMTHRDS; i++) { /* Each thread works on a different set of data. The offset is specified by 'i'. The size of the data for each thread is indicated by VECLEN. */ pthread_create(&callThd[i], &attr, dotprod, (void *)i); } pthread_attr_destroy(&attr); /* Wait on the other threads */ for(i=0; i<NUMTHRDS; i++) { pthread_join(callThd[i], &status); } /* After joining, print out the results and cleanup */ printf ("Sum = %f \n", dotstr.sum); free (a); free (b); pthread_mutex_destroy(&mutexsum); pthread_exit(NULL); }
Serial version
Pthreads version
| Condition Variables |
Overview
- Condition variables provide yet another way for threads to synchronize. While mutexes implement synchronization by controlling thread access to data, condition variables allow threads to synchronize based upon the actual value of data.
- Without condition variables, the programmer would need to have threads continually polling (possibly in a critical section), to check if the condition is met. This can be very resource consuming since the thread would be continuously busy in this activity. A condition variable is a way to achieve the same goal without polling.
- A condition variable is always used in conjunction with a mutex lock.
- A representative sequence for using condition variables is shown below.
Main Thread - Declare and initialize global data/variables which require synchronization (such as "count")
- Declare and initialize a condition variable object
- Declare and initialize an associated mutex
- Create threads A and B to do work
Thread A - Do work up to the point where a certain condition must occur (such as "count" must reach a specified value)
- Lock associated mutex and check value of a global variable
- Call pthread_cond_wait() to perform a blocking wait for signal from Thread-B. Note that a call to pthread_cond_wait() automatically and atomically unlocks the associated mutex variable so that it can be used by Thread-B.
- When signalled, wake up. Mutex is automatically and atomically locked.
- Explicitly unlock mutex
- Continue
Thread B - Do work
- Lock associated mutex
- Change the value of the global variable that Thread-A is waiting upon.
- Check value of the global Thread-A wait variable. If it fulfills the desired condition, signal Thread-A.
- Unlock mutex.
- Continue
Main Thread - Join / Continue
| Condition Variables |
Creating and Destroying Condition Variables
Routines:
| pthread_cond_init (condition,attr) pthread_cond_destroy (condition) pthread_condattr_init (attr) pthread_condattr_destroy (attr) |
Usage:
- Condition variables must be declared with type pthread_cond_t, and must be initialized before they can be used. There are two ways to initialize a condition variable:
- Statically, when it is declared. For example:
pthread_cond_t myconvar = PTHREAD_COND_INITIALIZER; - Dynamically, with the pthread_cond_init() routine. The ID of the created condition variable is returned to the calling thread through the condition parameter. This method permits setting condition variable object attributes, attr.
- Statically, when it is declared. For example:
- The optional attr object is used to set condition variable attributes. There is only one attribute defined for condition variables: process-shared, which allows the condition variable to be seen by threads in other processes. The attribute object, if used, must be of type pthread_condattr_t (may be specified as NULL to accept defaults).Note that not all implementations may provide the process-shared attribute.
- The pthread_condattr_init() and pthread_condattr_destroy() routines are used to create and destroy condition variable attribute objects.
- pthread_cond_destroy() should be used to free a condition variable that is no longer needed.
| Condition Variables |
Waiting and Signaling on Condition Variables
Routines:
| pthread_cond_wait (condition,mutex) pthread_cond_signal (condition) pthread_cond_broadcast (condition) |
Usage:
- pthread_cond_wait() blocks the calling thread until the specified condition is signalled. This routine should be called while mutex is locked, and it will automatically release the mutex while it waits. After signal is received and thread is awakened, mutex will be automatically locked for use by the thread. The programmer is then responsible for unlocking mutex when the thread is finished with it.Recommendation: Using a WHILE loop instead of an IF statement (see watch_count routine in example below) to check the waited for condition can help deal with several potential problems, such as:
- If several threads are waiting for the same wake up signal, they will take turns acquiring the mutex, and any one of them can then modify the condition they all waited for.
- If the thread received the signal in error due to a program bug
- The Pthreads library is permitted to issue spurious wake ups to a waiting thread without violating the standard.
- The pthread_cond_signal() routine is used to signal (or wake up) another thread which is waiting on the condition variable. It should be called after mutex is locked, and must unlock mutex in order for pthread_cond_wait() routine to complete.
- The pthread_cond_broadcast() routine should be used instead of pthread_cond_signal() if more than one thread is in a blocking wait state.
- It is a logical error to call pthread_cond_signal() before calling pthread_cond_wait().
Proper locking and unlocking of the associated mutex variable is essential when using these routines. For example:
|
Example: Using Condition Variables
- This simple example code demonstrates the use of several Pthread condition variable routines.
- The main routine creates three threads.
- Two of the threads perform work and update a "count" variable.
- The third thread waits until the count variable reaches a specified value.
Using Condition Variables Example1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96#include <pthread.h> #include <stdio.h> #include <stdlib.h> #define NUM_THREADS 3 #define TCOUNT 10 #define COUNT_LIMIT 12 int count = 0; int thread_ids[3] = {0,1,2}; pthread_mutex_t count_mutex; pthread_cond_t count_threshold_cv; void *inc_count(void *t) { int i; long my_id = (long)t; for (i=0; i<TCOUNT; i++) { pthread_mutex_lock(&count_mutex); count++; /* Check the value of count and signal waiting thread when condition is reached. Note that this occurs while mutex is locked. */ if (count == COUNT_LIMIT) { pthread_cond_signal(&count_threshold_cv); printf("inc_count(): thread %ld, count = %d Threshold reached.\n", my_id, count); } printf("inc_count(): thread %ld, count = %d, unlocking mutex\n", my_id, count); pthread_mutex_unlock(&count_mutex); /* Do some "work" so threads can alternate on mutex lock */ sleep(1); } pthread_exit(NULL); } void *watch_count(void *t) { long my_id = (long)t; printf("Starting watch_count(): thread %ld\n", my_id); /* Lock mutex and wait for signal. Note that the pthread_cond_wait routine will automatically and atomically unlock mutex while it waits. Also, note that if COUNT_LIMIT is reached before this routine is run by the waiting thread, the loop will be skipped to prevent pthread_cond_wait from never returning. */ pthread_mutex_lock(&count_mutex); while (count<COUNT_LIMIT) { pthread_cond_wait(&count_threshold_cv, &count_mutex); printf("watch_count(): thread %ld Condition signal received.\n", my_id); } count += 125; printf("watch_count(): thread %ld count now = %d.\n", my_id, count); pthread_mutex_unlock(&count_mutex); pthread_exit(NULL); } int main (int argc, char *argv[]) { int i, rc; long t1=1, t2=2, t3=3; pthread_t threads[3]; pthread_attr_t attr; /* Initialize mutex and condition variable objects */ pthread_mutex_init(&count_mutex, NULL); pthread_cond_init (&count_threshold_cv, NULL); /* For portability, explicitly create threads in a joinable state */ pthread_attr_init(&attr); pthread_attr_setdetachstate(&attr, PTHREAD_CREATE_JOINABLE); pthread_create(&threads[0], &attr, watch_count, (void *)t1); pthread_create(&threads[1], &attr, inc_count, (void *)t2); pthread_create(&threads[2], &attr, inc_count, (void *)t3); /* Wait for all threads to complete */ for (i=0; i<NUM_THREADS; i++) { pthread_join(threads[i], NULL); } printf ("Main(): Waited on %d threads. Done.\n", NUM_THREADS); /* Clean up and exit */ pthread_attr_destroy(&attr); pthread_mutex_destroy(&count_mutex); pthread_cond_destroy(&count_threshold_cv); pthread_exit(NULL); }
| Monitoring, Debugging and Performance Analysis Tools for Pthreads |
Monitoring and Debugging Pthreads:
- Debuggers vary in their ability to handle Pthreads. The TotalView debugger is LC's recommended debugger for parallel programs. It is well suited for both monitoring and debugging threaded programs.
- An example screenshot from a TotalView session using a threaded code is shown below.
- Stack Trace Pane: Displays the call stack of routines that the selected thread is executing.
- Status Bars: Show status information for the selected thread and its associated process.
- Stack Frame Pane: Shows a selected thread's stack variables, registers, etc.
- Source Pane: Shows the source code for the selected thread.
- Root Window showing all threads
- Threads Pane: Shows threads associated with the selected process

- See the TotalView Debugger tutorial for details.
- The Linux ps command provides several flags for viewing thread information. Some examples are shown below. See the man page for details.
% ps -Lf UID PID PPID LWP C NLWP STIME TTY TIME CMD blaise 22529 28240 22529 0 5 11:31 pts/53 00:00:00 a.out blaise 22529 28240 22530 99 5 11:31 pts/53 00:01:24 a.out blaise 22529 28240 22531 99 5 11:31 pts/53 00:01:24 a.out blaise 22529 28240 22532 99 5 11:31 pts/53 00:01:24 a.out blaise 22529 28240 22533 99 5 11:31 pts/53 00:01:24 a.out % ps -T PID SPID TTY TIME CMD 22529 22529 pts/53 00:00:00 a.out 22529 22530 pts/53 00:01:49 a.out 22529 22531 pts/53 00:01:49 a.out 22529 22532 pts/53 00:01:49 a.out 22529 22533 pts/53 00:01:49 a.out % ps -Lm PID LWP TTY TIME CMD 22529 - pts/53 00:18:56 a.out - 22529 - 00:00:00 - - 22530 - 00:04:44 - - 22531 - 00:04:44 - - 22532 - 00:04:44 - - 22533 - 00:04:44 -
- LC's Linux clusters also provide the top command to monitor processes on a node. If used with the -H flag, the threads contained within a process will be visible. An example of the top -H command is shown below. The parent process is PID 18010 which spawned three threads, shown as PIDs 18012, 18013 and 18014.

Performance Analysis Tools:
- There are a variety of performance analysis tools that can be used with threaded programs. Searching the web will turn up a wealth of information.
- At LC, the list of supported computing tools can be found at: computing.llnl.gov/code/content/software_tools.php.
- These tools vary significantly in their complexity, functionality and learning curve. Covering them in detail is beyond the scope of this tutorial.
- Some tools worth investigating, specifically for threaded codes, include:
- Open|SpeedShop
- TAU
- HPCToolkit
- PAPI
- Intel VTune Amplifier
- ThreadSpotter
| LLNL Specific Information and Recommendations |
This section describes details specific to Livermore Computing's systems.
Implementations:
- All LC production systems include a Pthreads implementation that follows draft 10 (final) of the POSIX standard. This is the preferred implementation.
- Implementations differ in the maximum number of threads that a process may create. They also differ in the default amount of thread stack space.
Compiling:
- LC maintains a number of compilers, and usually several different versions of each - see the LC's Supported Compilers web page.
- The compiler commands described in the Compiling Threaded Programs section apply to LC systems.
Mixing MPI with Pthreads:
- This is the primary motivation for using Pthreads at LC.
- Design:
- Each MPI process typically creates and then manages N threads, where N makes the best use of the available cores/node.
- Finding the best value for N will vary with the platform and your application's characteristics.
- In general, there may be problems if multiple threads make MPI calls. The program may fail or behave unexpectedly. If MPI calls must be made from within a thread, they should be made only by one thread.
- Compiling:
- Use the appropriate MPI compile command for the platform and language of choice
- Be sure to include the required Pthreads flag as shown in the Compiling Threaded Programs section.
- An example code that uses both MPI and Pthreads is available below. The serial, threads-only, MPI-only and MPI-with-threads versions demonstrate one possible progression.
- Serial
- Pthreads only
- MPI only
- MPI with pthreads
- makefile
| Topics Not Covered |
Several features of the Pthreads API are not covered in this tutorial. These are listed below. See the Pthread Library Routines Reference section for more information.
- Thread Scheduling
- Implementations will differ on how threads are scheduled to run. In most cases, the default mechanism is adequate.
- The Pthreads API provides routines to explicitly set thread scheduling policies and priorities which may override the default mechanisms.
- The API does not require implementations to support these features.
- Keys: Thread-Specific Data
- As threads call and return from different routines, the local data on a thread's stack comes and goes.
- To preserve stack data you can usually pass it as an argument from one routine to the next, or else store the data in a global variable associated with a thread.
- Pthreads provides another, possibly more convenient and versatile, way of accomplishing this through keys.
- Mutex Protocol Attributes and Mutex Priority Management for the handling of "priority inversion" problems.
- Condition Variable Sharing - across processes
- Thread Cancellation
- Threads and Signals
- Synchronization constructs - barriers and locks
| Pthread Exercise 2 |
Mutexes, Condition Variables and Hybrid MPI with Pthreads
Overview:
|
This completes the tutorial.
 | Please complete the online evaluation form - unless you are doing the exercise, in which case please complete it at the end of the exercise. |
Where would you like to go now?
- Exercise
- Agenda
- Back to the top
| References and More Information |
- Author: Blaise Barney, Livermore Computing.
- POSIX Standard: www.unix.org/version3/ieee_std.html
- "Pthreads Programming". B. Nichols et al. O'Reilly and Associates.
- "Threads Primer". B. Lewis and D. Berg. Prentice Hall
- "Programming With POSIX Threads". D. Butenhof. Addison Wesley
- "Programming With Threads". S. Kleiman et al. Prentice Hall
| Appendix A: Pthread Library Routines Reference |
- For convenience, an alphabetical list of Pthread routines, linked to their corresponding man page, is provided below.
pthread_atfork
pthread_attr_destroy
pthread_attr_getdetachstate
pthread_attr_getguardsize
pthread_attr_getinheritsched
pthread_attr_getschedparam
pthread_attr_getschedpolicy
pthread_attr_getscope
pthread_attr_getstack
pthread_attr_getstackaddr
pthread_attr_getstacksize
pthread_attr_init
pthread_attr_setdetachstate
pthread_attr_setguardsize
pthread_attr_setinheritsched
pthread_attr_setschedparam
pthread_attr_setschedpolicy
pthread_attr_setscope
pthread_attr_setstack
pthread_attr_setstackaddr
pthread_attr_setstacksize
pthread_barrier_destroy
pthread_barrier_init
pthread_barrier_wait
pthread_barrierattr_destroy
pthread_barrierattr_getpshared
pthread_barrierattr_init
pthread_barrierattr_setpshared
pthread_cancel
pthread_cleanup_pop
pthread_cleanup_push
pthread_cond_broadcast
pthread_cond_destroy
pthread_cond_init
pthread_cond_signal
pthread_cond_timedwait
pthread_cond_wait
pthread_condattr_destroy
pthread_condattr_getclock
pthread_condattr_getpshared
pthread_condattr_init
pthread_condattr_setclock
pthread_condattr_setpshared
pthread_create
pthread_detach
pthread_equal
pthread_exit
pthread_getconcurrency
pthread_getcpuclockid
pthread_getschedparam
pthread_getspecific
pthread_join
pthread_key_create
pthread_key_delete
pthread_kill
pthread_mutex_destroy
pthread_mutex_getprioceiling
pthread_mutex_init
pthread_mutex_lock
pthread_mutex_setprioceiling
pthread_mutex_timedlock
pthread_mutex_trylock
pthread_mutex_unlock
pthread_mutexattr_destroy
pthread_mutexattr_getprioceiling
pthread_mutexattr_getprotocol
pthread_mutexattr_getpshared
pthread_mutexattr_gettype
pthread_mutexattr_init
pthread_mutexattr_setprioceiling
pthread_mutexattr_setprotocol
pthread_mutexattr_setpshared
pthread_mutexattr_settype
pthread_once
pthread_rwlock_destroy
pthread_rwlock_init
pthread_rwlock_rdlock
pthread_rwlock_timedrdlock
pthread_rwlock_timedwrlock
pthread_rwlock_tryrdlock
pthread_rwlock_trywrlock
pthread_rwlock_unlock
pthread_rwlock_wrlock
pthread_rwlockattr_destroy
pthread_rwlockattr_getpshared
pthread_rwlockattr_init
pthread_rwlockattr_setpshared
pthread_self
pthread_setcancelstate
pthread_setcanceltype
pthread_setconcurrency
pthread_setschedparam
pthread_setschedprio
pthread_setspecific
pthread_sigmask
pthread_spin_destroy
pthread_spin_init
pthread_spin_lock
pthread_spin_trylock
pthread_spin_unlock
pthread_testcancel
This work was performed under the auspices of the U.S. Department of Energy by Lawrence Livermore National Laboratory under Contract DE-AC52-07NA27344.
来源: https://computing.llnl.gov/tutorials/pthreads/

